Yes, Anne, this is a deleuze+gattari-ian moment: extracted from Deleuze and Guattari's bible: A Thousands Plateaux.
extracted from Deleuze and Guattari's bible: A Thousands Plateaux.
rhizomatic moment
in Culture
Yes, Anne, this is a deleuze+gattari-ian moment:
extracted from Deleuze and Guattari's bible: A Thousands Plateaux.
An interesting debate about cheating in ACM's Ubiquity. Donald Norman reply to Evan Golub. Golub's point was to question the open-book/open-notes exam that may trigger cheating situations. Norman's take is about defending cheating:
I was disturbed by Golub's article because the emphasis was on cheating by students and possible counteractive measures. Never did he ask the more fundamental questions: What is the purpose of an examination; Why do students cheat? Instead, he proposed that faculty become police enforcers, trying to weed out dishonest behavior. I would prefer to turn faculty into educators and mentors, guiding students to use all the resources at their disposal to solve important problems. (...) But in real life, asking others for help is not only permitted, it is encouraged. Why not rethink the entire purpose of our examination system? We should be encouraging students to learn how to use all possible resources to come up with effective answers to important problems.
Then he adresses "the origins of cheating, and by solving the root cause, to simultaneously reduce or eliminate cheating while enhancing learning.":
Consider this: in many ways, the behavior we call cheating in schools is exactly the behavior we desire in the real world. Think about it. What behavior do we call cheating in the school system? Asking others for help, copying answers, copying papers. Most of these activities are better called networking or cooperative work. (...) How much better to reward procedures for coming up with answers. Emphasize understanding of the issues and knowledge of how to gain insight and resolution. Emphasize cooperation.
Laboratory for Context-dependent Mobile Communication:
Context-dependent Mobile Communication is a strategic research theme at the IT University of Copenhagen. It consists of research activities within a value chain ranging from social and cultural implications of mobile communication to the technological infrastructure needed to make context-dependent mobile communication a reality. A key difference to other research on mobile computing is the incorporation of "context," that is, information that characterizes a situation related to the interaction between users, applications, and the surrounding environment.
They also work on gaming:
This project will do applied research on the area of location-based gaming. Starting from a survey of the current status of the area, we will identify the key theoretical concepts to be explored, as well as get involved in the development of a location-based gaming platform, where we will be able to carry out game concepts from the idea phase to gameplay implementation and testing. Our research will focus on exploring new directions in game design and game development, testing design methodology questions, investigating the special features of space as a layer upon reality (superposition of virtual space on real space), and studying how the threshold between real space and game space can be shaken and problematized. The location-based gaming platform to be developed will provide a number of services to game developers, and we will use it to implement several location-based games
A very tricky tool: the executive laptop steering wheel mount:
Mount your laptop or notebook to your car's steering wheel and catch up on all your work while parked for extended periods at a location. Ideal for outside field sales and service professionals, real estate executives, students, etc. Arkon's Executive Laptop Steering Wheel Mount will hold ALL portable laptops up to 10 Lbs. in weight. A ball point pen included conveniently attaches to the underside of the base of the mount. The laptop steering wheel mount is very portable. It conveniently folds up and can be stored under the seat while not in use.IMPORTANT NOTE & SAFETY WARNING: THIS PRODUCT IS ONLY FOR USE WHEN THE VEHICLE IS PARKED AND THE IGNITION IS TURNED OFF. DO NOT ATTEMPT TO DRIVE A VEHICLE WITH MOUNT ATTACHED TO STEERING WHEEL. DEATH or INJURY TO YOURSELF AND OTHERS WOULD OCCUR. ARKON RESOURCES, INC. ASSUMES NO RESPONSIBILITY OF LIABILITY IF THIS SOLUTION IS USED IN ANY OTHER CAPACITY THAN DESCRIBED HEREIN.

I don't if giving angry teenagers this kind of virtual dentist simulator would either interest ot calm them down but it seems that medecine-related simulators are a very thriving domain for VR/tangible computing specialist (as attested by the wonderful bovine palpation simulator).
Look at this nice dentist simulator, they use "computerized dental dummies", it's developed by denx:
 Now let's think about this kind of interface could be hacked, tricked or modified: this wired driller could be a powerful controller for weird gaming purposes.
Now let's think about this kind of interface could be hacked, tricked or modified: this wired driller could be a powerful controller for weird gaming purposes.
BattleBoard 3D (BB3D) is a simple augmented reality game prototype conducted by Sune Kristense, Bjørn W. Nielsen, Troels Lange at interactivespaces
The original source of inspiration for the BB3D project was a sequence in the movie Star Wars Episode IV where two characters are playing a game of chess. The different pieces of the chess game are alive, moving and making comments of the game, and when a strike is executed a battle between the actual pieces are shown on the field of the board. The vision with the BB3D prototype was to make this scenario come through outside the world of fiction film in the actual settings of traditional board game playing. Physical pieces are dismantled and recombined to invoke a battlePhysical pieces are dismantled and recombined to invoke a battleIn BB3D the physical pieces are associated with animations which show the virtual representation of pieces and the outcome of occasional battles. This kind of augmentation provokes new ways to interact with computers, which enables the user/player to maintain the same kind of interaction as known from classical board games – the interaction is purely based on physical interaction. (...) Through VR goggles enhanced with a Web cam or with a Web cam and a display, the player can experience the battles in the virtual world. The game is played on a six times seven squared board and each player starts with seven pieces. (...) The construction theme in LEGO gives the possibility of combining pieces to create a new unique pattern which invokes the battles between pieces. This is done by breaking off the halves of the pieces carrying information and assembling new halves again. Future research may be to support players to build their own physical pieces in LEGO and thereby defining their own unique markers and to utilize a different kind of goggle to minimize the fumbling when moving pieces.

Why do I blog this?I like this idea of mixing augmented reality and physical pieces of LEGO!
The Under the Pier Show presents very nice experience of crazy slot machines and simulator amazingly modified. The folk shows his collection of home-made slot machines and simulator, on Soutwhold Pierre in Suffolk (UK). Nice hacks! My favorite is the Microbreak (even though the gene forecaster or the autofrisk are great too).
Simply sit on the chair and the carpet tips and rocks as you watch a TV animation of your flight and coach transfer, ending up on a tropical beach. At this point the TV lamp swings up, shining a heat lamp in your face. After soaking in the heat, you’re whisked home again, the whole experience lasting less than 3 minutes


After watching 2 videos of CatchBob replay: - Check where people wrote (index of position) - mutual modeling act: "I saw that you were going in that direction, then I did not communicate that much": the person assume that his partner writes where he is. - players evaluates the plausibility of information: "I saw that Sandra was not moving, but I know her, she always move and she 's not lazy, so she was moving": players questioned the tool accuracy.
- when confronted to a discrepancy (due to the system), the are 3 reactions: believing the system, saying that the system is wrong or not understanding. Two discrepancies in catchbob: one's position (automatic) and others' position (automatic or manual). "I saw that it was indicated that B was positioned here but he was not", "I saw that B moved on the screen but I know he did not". Toward a discrepancy, people react with regard to information + expectations (the strategy decided or implicit information like knowing the partner)
- about the group confrontation: is the person who first get the signal who it the "narrative leader" during the replay? and is he the one send the larger number of messages/strategy messages? How does he influence the others?
- the word "reconfiguration" is not good, when talking about strategy
- Is the strategy negotiated (during the game) or is it just a personal strategy?
- importance of the weather?
- count the number of face2face meetings during the game (logfiles + replay)
- beware of players' personality, some players do not communicate before being sure of something. THEN, TRY TO KNOW SINCE WHEN THEY communicate their proximity to Bob.
- CHECK, when one player reached a high signal strength, if the keep noting the others signal strength (below) COMMUNICATION ECONOMY
- Strategy investigation: work on the two parts: foraging + triangle forming (for the latter part, check Morris maze strategies).
- 2 types of inferences: about the others, about the environment/network, about the environment/topology
- Do people write on a map as on a sheet of paper, are there different patterns? A lot make little annotation, some write big sentences
pierre was also impressed by the quality of people's narration, when confronted to their paths: they remind pretty well both their activity + the activity of their partners.
Conclusion: the awareness tool make people not discussing the strategy (there is no needs or inhibition due to to the awareness tool) OR since they do not discuss they don't talk about the strategy.
Concerning the mutual modeling, things are very simple in CatchBob!, players have to model their partners position and direction. Agreeing on the strategy is a cognitive prothesis for mutual modeling (once people decide a strategy they do not discuss it)
A nice independent variable: "no awareness tool" for a first BOB, then a second one with the tool.
Well, CatchBob! task could be a bit more complex if add new dimensions like in the sheepdog trial:
Sheepdog trial (or simply dog trial) is a competitive dog sport in which herding dog breeds move sheep around a field, fences, gates, or enclosures as directed by their handlers. Such events are particularly associated with hill farming areas, where sheep range widely on largely unfenced land. These trials are popular in the United Kingdom, Ireland, Canada, the USA, Australia, New Zealand and other farming nations.
Different scenarios are possible:
There are several events, but the key element is the control of three to six sheep by one or two highly trained dogs under the control of a single shepherd. Both time and obedience play a part, as competitors are penalised if a sheep strays from the prescribed course.
One event consists of having the dog send three sheep up a steep hill through three or more gates. The shepherd must stand at the bottom of the hill and direct the dog by whistling. The huntaway dog barks loudly to push the sheep ahead up the hill.
Another popular event involves having the dog split six sheep into two groups of three and conducting each group in turn to small pens through a defined course by heading dogs. The group not being led is guarded by one of the two dogs, an eye-dog (from its ability to keep the sheep still by head movement alone). This is more difficult than it sounds, as the sheep invariably try to stay together.
PELOTE is an interesting EU research project "focused on how human firefighters and their robot counterparts would make use of a personal navigation and localisation system which could guide their movements, at the same time informing the external command centre of the exact location of each team member.(...) Researchers developed a backpack for the firefighter which uses inertial guidance systems, rather than GPS, to provide the location as shown on a personal display screen, as well as that of the command centre. “The idea is that team members would download a map of the interior before entering the building, and with the start point being calibrated at, say, the entrance, this personal map would enable them to know where they are – no matter how bad the visibility.”" The project website is here.
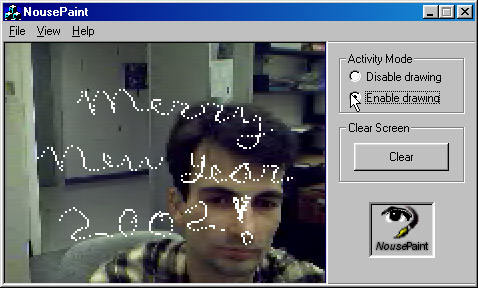
"Nouseâ use your nose as a joystick or mouse is an interesting project about alternative interaction carried out by D.O. Gorodnichy , S. Malik , G. Roth at the Computational Video Group, IIT, National Research Council, Ottawa.
Nouse stands for âUse your nose as a mouseâ and is the name of the technology which allows one to operate the computer with the motion of his/her nose. (...)It is based on tracking the so-called convex-shape nose feature, which is the extremum of a convex surface of the nose tip. Thus defined nose feature is rotation and scale invariant, it is seen at all times regardless of the face orientation. It also can be tracked with the sub-pixel precision guaranteed, and as such it makes it possible to operate with your nose as with a mouse (or a pen) or a joystick (or a pointer).
 A video (avi) here.
A video (avi) here.
I finally managed to find a breath-base joystick:Evreinov G., Evreinova T. "Breath-Joystick" – Graphical Manipulator for Physically Disabled Users. In Proceedings of the 7th International Conference on Computer Helping People with Special Needs. ICCHP2000, July 17-21, 2000, Karlsruhe, Germany, pp. 193-199. Unfortunately there is no picture of the device.
Manipulator of joystick’s type was implemented as device having a high sensitivity to human respiration flow. A circuit diagram of the breath-joystick is shown in Figure 1.
Six thermo-transducers are located in front of user’s mouth on a surface having special elements of construction, which are dividing and selecting necessary components of directed air stream. Thus, a prototype implements a function of two-dimension thermo-converter of coordinates, while two others thermo-transducers must emulated a function of buttons. Thermo-transducers have a temperature little bit above than environmental one (about 40?C), it allows to remove undesirable influence of a water vapor, being in air flow.
In our location-based game CatchBob!, there seems to be 3 different strategies, when participants spread over the campus: the first one is the most common, the last one is 2 exceptions:


Then there are 2 possibilities with regard to how the strategy evolves:


As I said yesterday, players without an automatic display of others position are more reconfiguring their strategy. There are 3 reasons to reconfigure or not the strategy:
How to move forward: check those 3 categories, use a chi-square to see if there are differences among the 2 groups:
And check how players reconfigure their strategies:
A good reference that summarizes the different kinds of spatial exploration strategies: Kallai, J., Makany, T., Karadi, K., & Jacobs, W. J. (2004). Spatial orientation strategies in Morris-type virtual water task for humans Behavioural Brain Research.Some excerpts I found relevant for my purpose:
The concept of spatial strategy varies in the research literature. The term “strategy” causes this confusion, as it refers to sets of strategies applied to specific behavioural situations. The most classic way in which psychology investigates the structure of behaviour is to observe performance across many situations and attempt to determine the possible commonalities of performance. Analysing the trajectories (search strategies) of rats during the completion of spatial tasks, for example, and describing the most common of these strategies is a simple and effective way to uncover invariance in exploration. (...) every goal-directed spatial action might be interpreted as spatial strategy Gaunet and Thinus-Blanc described two types of exploratory patterns: a Cyclic pattern and a Back and Forth pattern. (...) Hill et al. identified another set of search strategies. The first strategy involves the boundaries of the surrounding space. When this strategy is used, exploration is minimal, as the explorer stays close to the wall to maintain relative safety in a novel and frightening environment. The second strategy is a network-type exploration. The third strategy, an object-to-object strategy, involves random wandering until the first cue or landmark is found. A mixture of the first and third strategy also occurs; when the organism uses the boundary of the space as a reference point; nearby objects will be explored. A fifth strategy, which the authors identified as a special case, occurs when the organism uses a salient landmark as base reference and carries out all exploratory activity in relation to this point.
The authors also have their own categories, related to Morris' virtual maze:
Thigmotaxis represents a circular part of the path that is passed along close to the arena wall (...) We defined “circling” as an arc shaped search path, which occurred somewhere inside the arena but not close to the wall and with the same curvature as the arena wall (...) visual scan occurred when a subject remains in a fixed position and turns (...) Enfilading is composed of relatively small position corrections and non-strategic motions. During this search strategy, it seems that the subject performs a rapid search, small direction changes and some straight lines of walk on a limited area of the virtual space.
Though it's not directly usable for CatchBob! I have here an interesting account of various spatial strategies.
A nice aerial toboggan (.pdf!), designed by Franck Vial (awarded by Utopia 2.0):
I am currently trying to find a relevant method to explicit CatchBob's players strategies (i.e. their movement on the campus, how they spread and explore various places). From my cognitive sciences course, I don't have so much about it apart from experiment with rats in watermaze. For that matter Morris' maze is interesting: a subject is tracked while it attempts to escape onto a platform in a swimming pool (Morris, 1981). In my experiment, I have 3 subjects and they are not in a watermaze, but a campus.
I found this interesting software that helps researchers to analyse their data. They get results like:

I also like a lot the representation with all the paths, so that we can compare:

My interest is to move forward from this kind of representation to something more descriptive, with just relevant points. Like for instance, there are two kind of strategies: exploring vertically/horizontally. It's then amatter of finding constant design patterns into groups' strategies.
I am currently trying to find a relevant method to explicit CatchBob's players strategies (i.e. their movement on the campus, how they spread and explore various places). From my cognitive sciences course, I don't have so much about it apart from experiment with rats in watermaze. For that matter Morris' maze is interesting: a subject is tracked while it attempts to escape onto a platform in a swimming pool (Morris, 1981). In my experiment, I have 3 subjects and they are not in a watermaze, but a campus.
I found this interesting software that helps researchers to analyse their data. They get results like:
I also like a lot the representation with all the paths, so that we can compare:
My interest is to move forward from this kind of representation to something more descriptive, with just relevant points. Like for instance, there are two kind of strategies: exploring vertically/horizontally. It's then amatter of finding constant design patterns into groups' strategies.
Bluetooth™ Motion Cam ROB-1 is a video camera you can control with your Bluetooth™ mobile phone:
Use your phone to drive ROB-1 around and check out the surroundings with the built-in video camera. When you see something interesting, take a snapshot. You can tilt the camera so it’s easy to get a frog’s perspective – no more crawling around on your stomach to take those hard-to-get pictures.
ROB-1 streams video at fifteen frames per second directly to your mobile phone. So now ROB-1 can patrol the corridor and look out for your boss while you’re in your room trying to break your Tetris high score.
Is this a based on a user-centered design?
I just run few chi squared analysis on my CatchBob! data. It seems that people who are not provided with an automatic display of their partners' positions reconfigure more their strategies (= campus exploration) over time. It's another interesting argument! Besides the task division is a bit different in the two conditions: people without the location awareness tool explored less zones. This is an another important results in terms of performance: groups in both conditions approximately have the same performance but the ones without the tool explored a bit less.

